STEPPER MOTOR INTERFACING
Stepper motor is brushless DC motor, which can be rotated in small angles, these angles are called steps. Generally stepper motor use 200 steps to complete 360 degree rotation, means its rotate 1.8 degree per step. Stepper motor used in many devices which needs precise rotational movement like robots, antennas, hard drives etc. We can rotate stepper motor to any particular angle by giving it proper instructions.
Interfacing Stepper Motor with 8051 Microcontroller
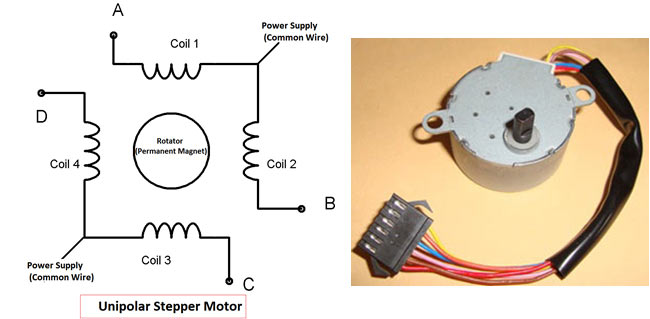
Interfacing with 8051 is very easy we just need to give the 0 and 1 to the four wires of stepper motor according to the above tables depending on which mode we want to run the stepper motor. And rest two wires should be connected to a proper 12v supply (depending on the stepper motor). Here we have used the unipolar stepper motor. We have connected four ends of the coils to the first four pins of port 2 of 8051 through the ULN2003A.

8051 doesn’t provide enough current to drive the coils so we need to use a current driver IC that is ULN2003A. ULN2003A is the array of seven NPN Darlington transistor pairs. Darlington pair is constructed by connecting two bipolar transistors to achieve high current amplification. In ULN2003A, 7 pins are input pins and 7 pins are output pins, two pins are for Vcc (power supply) and Ground. Here we are using four input and four output pins. We can also use L293D IC in place of ULN2003A for current amplification.
Steps | A | B | C | D |
1 | 1 | 0 | 0 | 0 |
2 | 1 | 1 | 0 | 0 |
3 | 0 | 1 | 0 | 0 |
4 | 0 | 1 | 1 | 0 |
5 | 0 | 0 | 1 | 0 |
6 | 0 | 0 | 1 | 1 |
7 | 0 | 0 | 0 | 1 |
8 | 1 | 0 | 0 | 1 |


Comments
Post a Comment